Dev-Jam officially got started Monday morning at 10:00.
I usually kick off the week with a welcome and some housekeeping information, and then I turn it over to Jesse White, our project CTO. We do a roundtable introduction and then folks break off into groups and start working on the projects they find interesting.
This year we did something a little different. The development team scheduled a series of talks about the various things that have been added since the last Dev-Jam, and I spent most of the day listening to them and learning a lot of details about the amazing platform that is OpenNMS. While we had some technical difficulties, most of these presentations were recorded and I’ll add links to the videos once they are available.
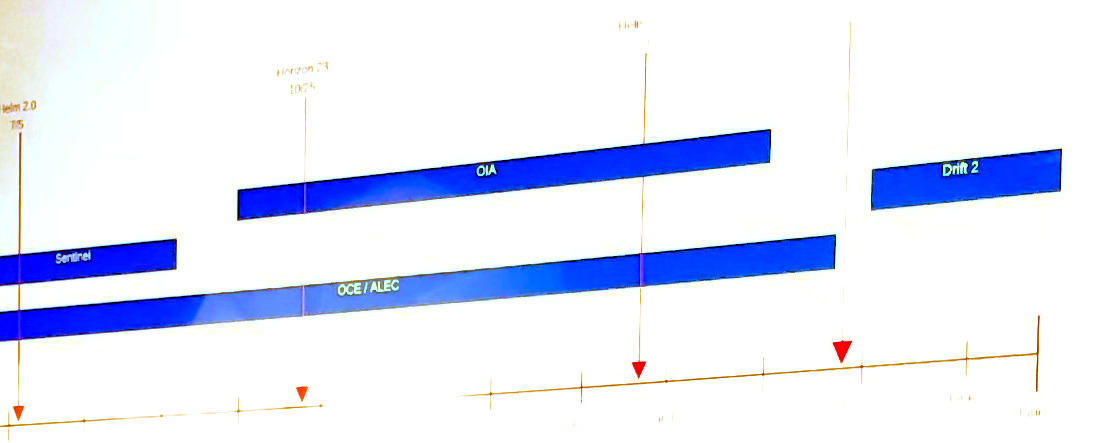
Jesse started with an overview of the main development projects over the last year. Sentinel is a project to use the Kafka messaging bus to distribute OpenNMS functionality over multiple instances. While only implemented for telemetry data at the moment (flows and metrics) the goal is to enable the ability to distribute all of the functionality, such as service assurance polling and data collection, across multiple machines for virtually unlimited scalability.
After the Sentinel work, focus was on both the OpenNMS Integration API (OIA) and the Architecture for Learning Enabled Correlation (ALEC).
The OIA is a Java API to make it easier to add functionality to OpenNMS. While it is used internally, the goal is to make it easier for third parties to integrate with the platform. ALEC is a framework for adding AI and machine learning functions to OpenNMS. It currently supports two methods for the correlation of alarms into situations: DBScan and TensorFlow, but is designed to allow for others to be added.
The current development focus is on the next version of Drift. Drift is the feature that does flow collection, and there are a number of improvements being worked on for “version 2”.
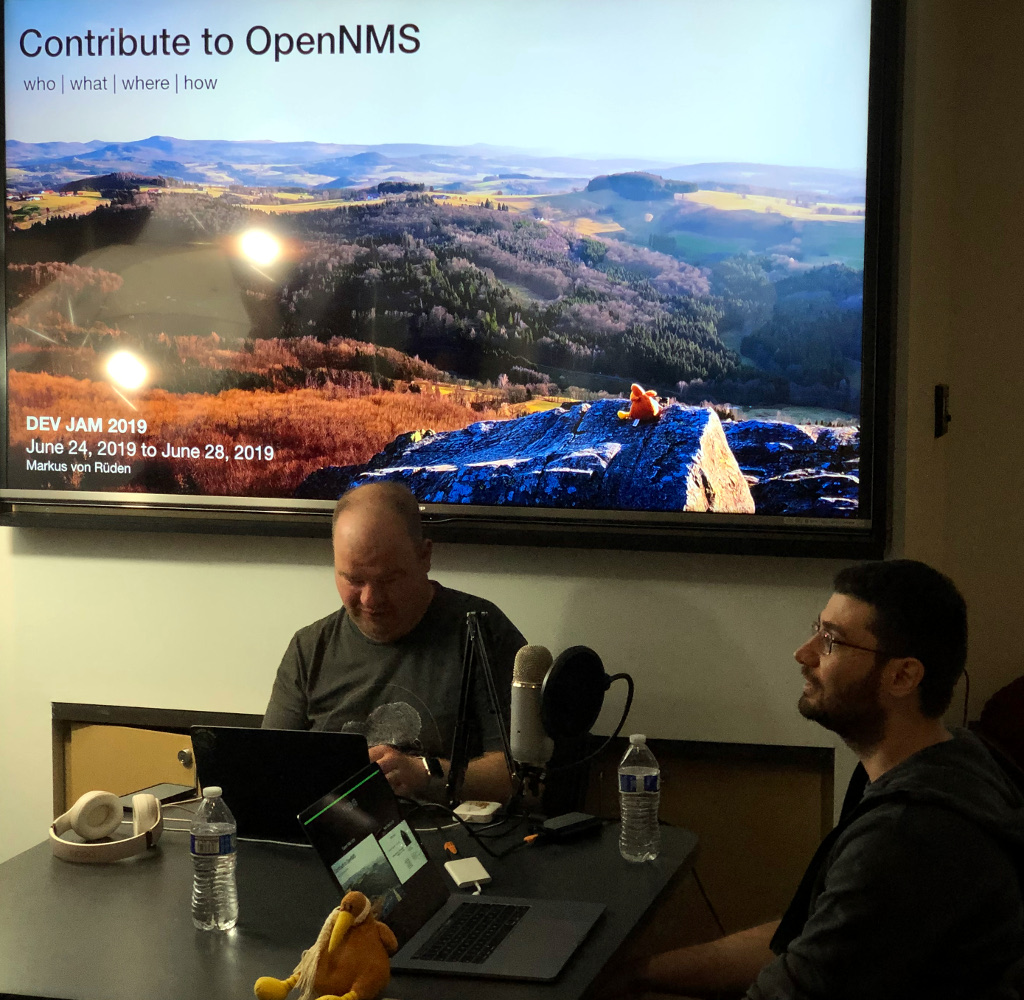
Markus von Rüden gave the next talk on contributing to OpenNMS. He covered a number of topics including dealing with our git repository, pull requests, test driven development and our continuous integration systems.
Matt Brooks presented an overview on how to leverage Karaf to add functionality to OpenNMS. Karaf is the OSGi container used by OpenNMS to manage features, and Matt used a simple example to show the process for adding functionality to the platform.

Extending on this was a talk by Chandra Gorantla about using the OIA with an example of creating a trouble ticketing integration. OpenNMS has had a ticketing API for some time but this talk leveraged the improvements added by the new API to make the process easier.
Following this was a talk by David Smith on ALEC. He demonstrated how to add a simple time-based correlation to OpenNMS which covered a lot of the different pieces implemented by the architecture, including things like feedback.
That ended the development overview part of the presentation but there were two more talks on Docker and Kubernetes.
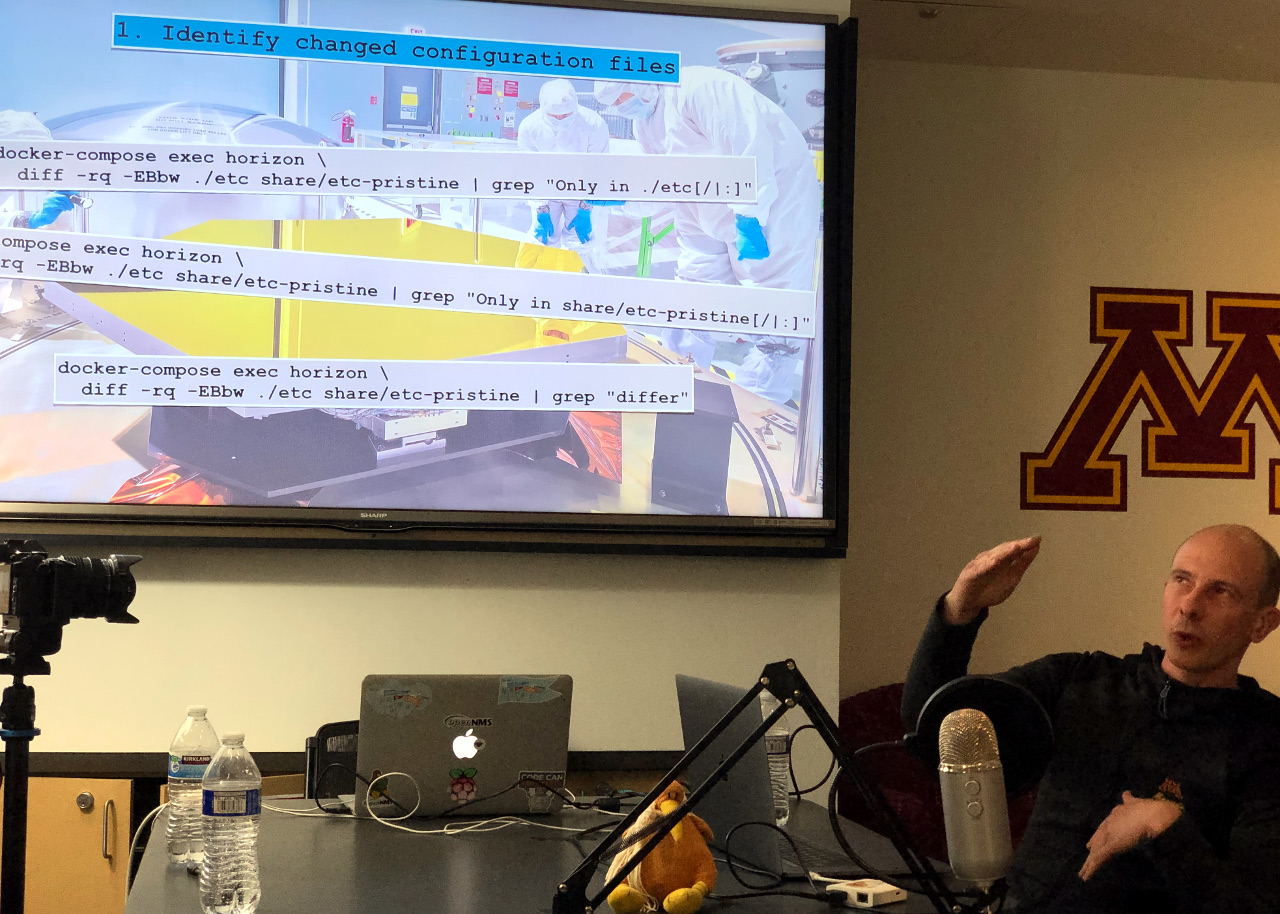
Ronny Trommer gave a short overview of running OpenNMS in Docker, covering a lot of information about how to deal with the non-immutable (mutable?) aspects of the platform such as configuration.
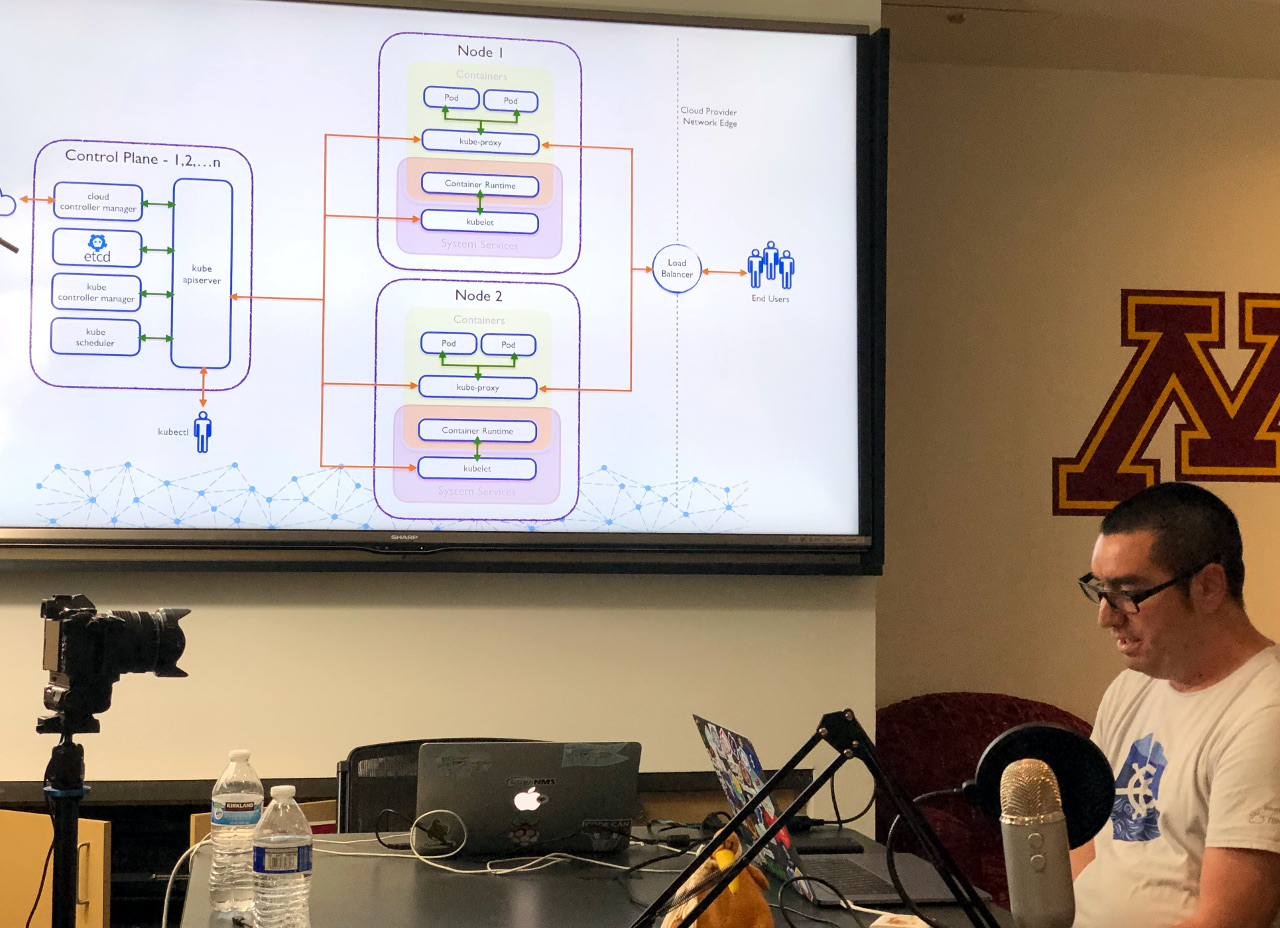
This was followed by an in-depth talk by Alejandro Galue on Kubernetes, running OpenNMS using Kubernetes and how OpenNMS can be used to monitor services running in Kubernetes. While Prometheus is the main application people implement for monitoring Kubernetes, it is very temporal and OpenNMS can augment a lot of that information, especially at the services level.
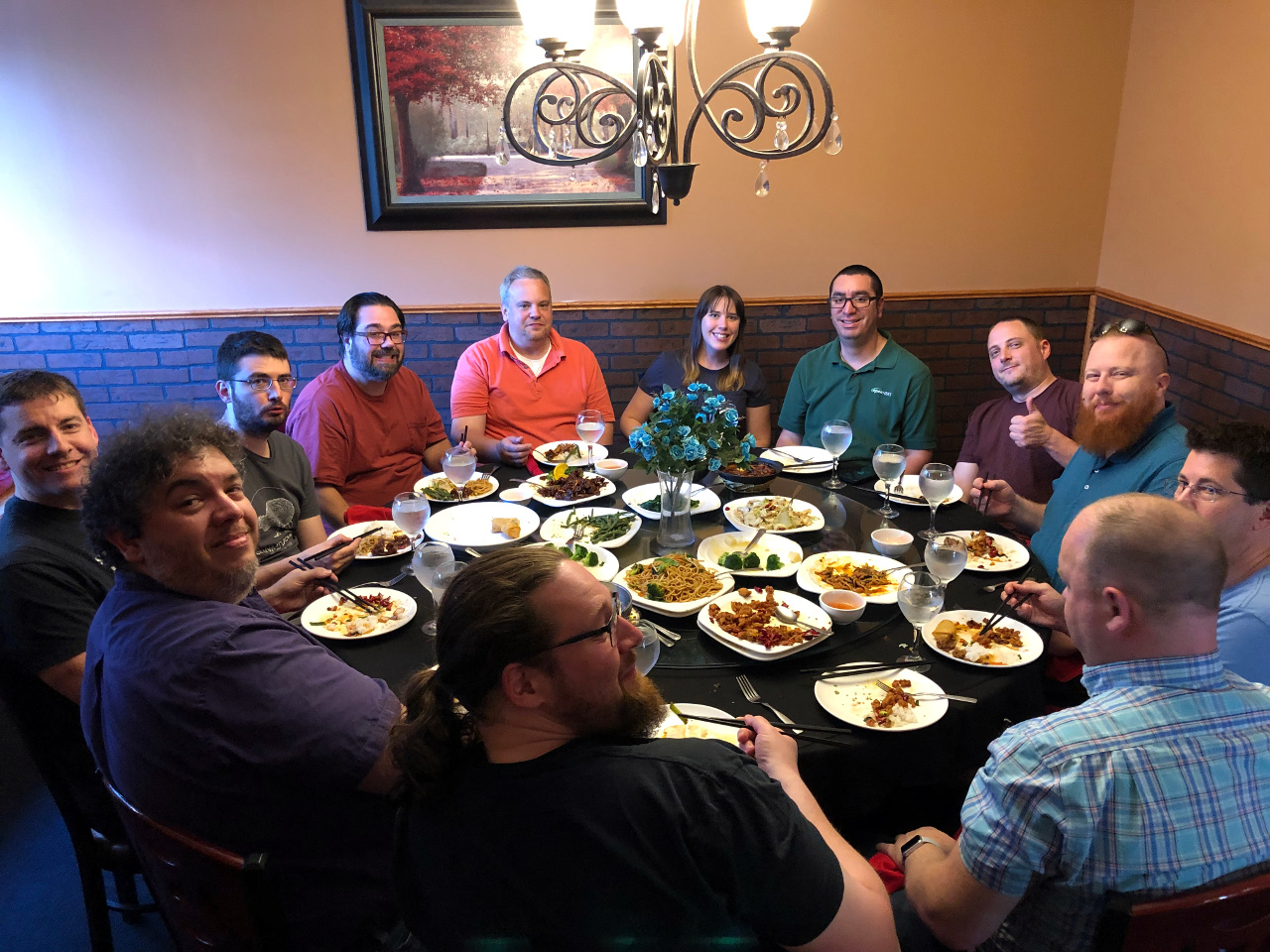
These presentations took up most of the day. Since it is hard to find places where 30 people can eat together, we have a tradition of getting catering from Brasa, and we did that for Monday night’s meal.

Jessica Hustace, who did the majority of the planning for Dev-Jam, handed out this year’s main swag gift: OpenNMS jackets.

Yup, I make this look good.